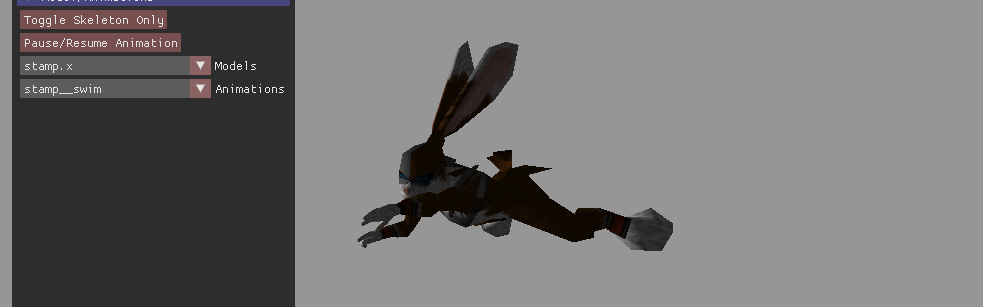
3D Skeletal Animation Engine
Platform: PC
Engine: Custom
Language: C++
Date: Sept. 2015 - Dec. 2015
Role(s): Graphics/Animation Programmer
This was built up over a semester for an animation programming class. It implements hierarchical skeletal animation systems for arbitrary meshes with support for both forward and inverse kinematics as well as path following along splines with animation speed-matching.